Ofte handler en samtale mellom sportsfiskere om utstyr. Vi er nok ikke så forskjellige fra andre hobbyutøvere akkurat der, men forbausende nok går gjerne praten om stenger, sneller, båter og andre deler av utstyrsjungelen som befinner seg over vann. Sist undertegnede sjekket, var det det under vann som var av størst betydning for fisken, men kanskje det nettopp er det at vi egentlig vet lite om det som skjer under vann som gjør at vi heller diskuterer det over vannet?
I motsetning til det tradisjonelle ekkoloddet (2D), bruker det skannende ekkoloddet svært høy frekvens og veldig smal kone på sitt signal. Det tradisjonelle ekkoloddet sender ut sitt akustiske signal i en kone hvis bunn er en ganske så perfekt sirkel, dvs ekkoloddet «ser» like mye til hver side, fremover og bakover. Det skannende ekkoloddets kone er ekstremt oval, svært smal i båtens fartsretning og tilsvarende bred på tvers av fartsretningen. Dette påvirker både hvor stort dekningsområdet ekkoloddet har, og hvordan det som er innenfor dekningsområdet ser ut på ekkoloddskjermen din. På bildet under ser du en grov sammenlikning av hvordan de ulike konevinklene og koneformene påvirker dekningsområdet på bunnen.
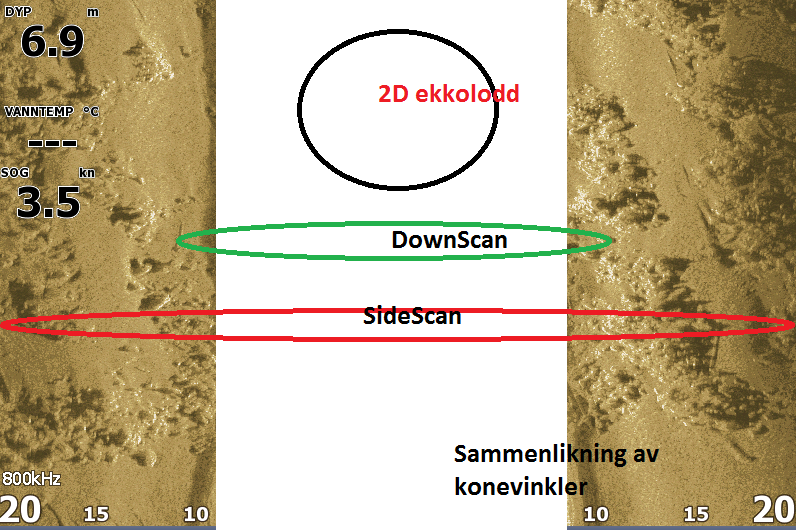 |
| Sammenlikning av dekningsområde for ulike konevinkler |
Siden konen til det skannende ekkoloddet er svært smal, er bildet du ser på ekkoloddskjermen din egentlig en serie med bilder fra denne smale stripen under båten din, som ekkoloddet setter sammen til det du ser på skjermen. Litt som hvis du setter ned farten på en film så mye at du ser ett og ett bilde fra filmrullen, bare at ekkoloddet altså «spiller av» disse bildene ved å sette de sammen. Det er den ekstremt smale konen, sammen med den høye frekvensen som gir de fotoliknende bildene på skjermen din. Ulempen med den smale konen er at den er mer eller mindre uegnet for å se etter fisk som de vanlige «bananene». I motsetning til gjenstander på bunnen er fisken ofte i bevegelse, den vises altså ikke på samme sted i hvert av disse bildene, og i praksis ser du bare fisken som en liten prikk på skjermen.
Jeg skal ikke gå så veldig dypt ned i selve teknikken, men det er greit å se litt på noen begreper før vi starter med skjermbilder og bruksområder. Forskjellige merker av maritim elektronikk har forskjellige navn på sine skannende ekkolodd, noe som bidrar til en noe forvirrende jungel av begreper.
Per i dag har Humminbird, Lowrance, Raymarine, Simrad og Garmin sine varianter. Alle (bortsett fra Lowrance og Simrad) bruker forskjellige navn på den samme teknologien, alle har litt forskjellige konevinkler, noen bruker chirp, noen bruker en og samme giver for både vanlig og skannende ekkolodd og så har vi forskjeller på om de(t) samme elementene i giveren bare ser ned, bare ser til siden for båten eller alt på en gang. I all ærlighets navn er ikke forskjellene mellom de ulike merkenes skannende ekkolodd store. Den dårlige nyheten er at det ER forskjell mellom prisklassene, også innenfor samme merke. Kanskje er det mer en konsekvens av kvaliteten på ekkoloddgiverne som benyttes enn selve måten å bruke teknologien merkene i mellom? I denne artikkelen bruker jeg Lowrance StructureScan som eksempel, fordi det er det jeg har i båten min.
I praksis kan det skannende ekkoloddet deles i tre varianter som er relevante for en sportsfisker. Det som ser ned, det som ser til siden og det som ser 360 grader rundt båten. Sistnevnte er det bare Humminbird og Lowrance som har, men vi skal uansett konsentrere oss på variantene som ser ned og/ til siden for båten denne gangen.
DownScan
DownScan (Lowrance/ Simrad), Down Imaging (Humminbird), Down Vü (Garmin) og DownVision (Raymarine) er grovt sett alle den samme teknologien. Vi begynner med et rent Downscanbilde. Bildet viser en stor stim med agnisk rett over bunnen. Du kan se at bunnen er ujevn, den bølger litt. Det er ikke fordi at bunnen er ujevn, det er rett og slett på grunn av en bitende nordavind som ga bølger på overflaten. Ekkoloddet måler avstanden fra ekkoloddgiveren til det du ser på (bunnen i dette tilfellet), og siden ekkoloddgiveren her spretter opp og ned i bølgene sammen med resten av båten, ser resultatet slik ut. Det er akkurat det samme som gjør at stimen med småfisk følger de samme «bølgene» på bunnen. Denne teknologien er følsom for urolig sjø, rett og slett fordi den er så følsom for alt. På et vanlig ekkoloddbilde ville disse «bølgene» blitt jevnet ut, men på grunn av den smale konen på det skannende ekkoloddet blir de mer synlige her. En annen effekt av bølger er at det blir endel støy øverst i bildet, dette er luftbobler som delvis kommer fra bølgene i seg selv, og delvis fra skroget på båten som slår i bølgene og presser luft bakover mot ekkoloddgiveren.
.png) |
| Småfisk tett på bunnen |
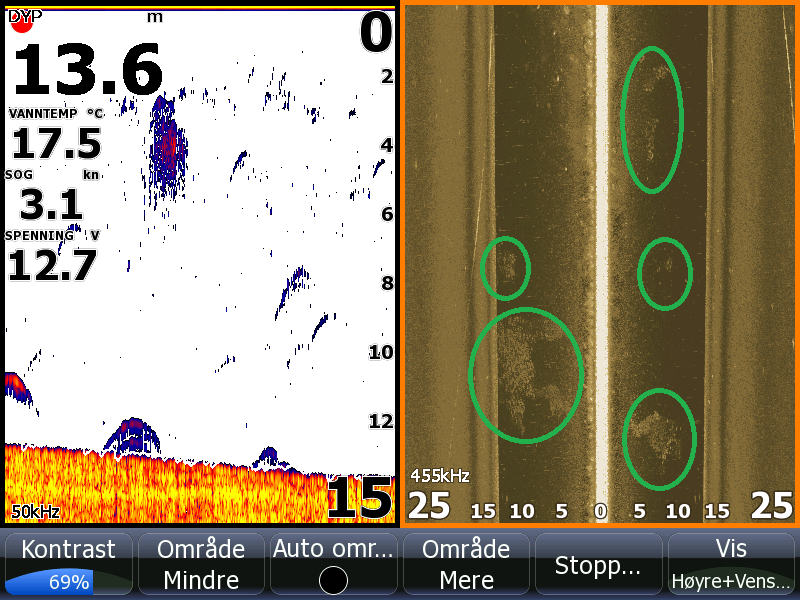
Neste bilde er splittscreen med vanlig ekkolodd til venstre og downscan til høyre. De to bildene viser det samme, men på hver sin måte. Innenfor den svarte sirkelen kan det se ut som 4 greie ekko på det tradisjonelle ekkoloddet. Som tidligere nevnt vises fisk på det skannende ekkoloddet som hvite prikker. Store prikker i dette tilfellet. 🙂 Den røde sirkelen viser svakere ekko, enten mindre fisk eller fisk helt i ytterkanten av konen for begge ekkoloddtypene.
 |
| Agnfisk både rett under og i ytterkant |
Det neste bildet viser en stor ball med agnfisk rett utenfor en kant. Det er sannsynligvis noe annet inne i agnfiskballen også, den svarte sirkelen markerer noe som kan se ut en tømmerstokk.
 |
| Ball med agnfisk ved en kant, og noe annet? |
Det siste skjermbildet av Downscan er ikke mitt, men viser hva som må ansees for å være helt på kanten av hvor dypt skannende ekkolodd har en misjon. Bildet viser vraket av det tyske krigsskipet Blücher i Oslofjorden.
 |
| Simrad DownScan |
SideScan
SideScan (Lowrance/ Simrad), Side Imaging ( Humminbird) og Side Vü (Garmin) er alle den samme teknologien. Som navnene antyder ser disse variantene ut til siden for båten. Rekkevidden varierer litt merkene imellom, men er først og fremst begrenset av forholdene.
Siden SideScan ser ca 45 grader ut til hver side av båten, må det tolkes på en litt annen måte. Tenk deg at streken som går nedover midt i bildet (rød sirkel på bildet under) er båtens kjøl. Skjermbildet ruller ovenfra og nedover, så det som er øverst er altså den ferskeste informasjonen, desto lengre ned på skjermen desto lengre bak båten vil det du ser på være. Til sammenlikning ruller et vanlig ekkoloddbilde (og DownScan) fra høyre og over mot venstre, så der er det det lengst til høyre på skjermbildet som er den ferskeste informasjonen.
På SideScanbildet har vi altså en strek i midten som er båten, så vannsøylen og mot ytterkanten av skjermen ser vi bunnen. Ekkoloddet forsøker å presentere en tredimensjonal undervannsverden på en todimmensjonal skjerm, så da må vi til en viss grad ta fantasien til hjelp. Den enkleste måten for undertegnede å tenke på SideScanbildet, er å tenke på hvordan det hadde sett ut dersom man printer ut bildet og brettet det langs midtlinjen med ca 45 graders vinkel. Det som er rett under båten vises ikke (det ser du på DownScan), men det du ser på er alt som befinner seg litt ut til hver side for båten. Ofte vil de to sidene av SideScanbildet se ut som speilbilder av hverandre, det er rett og slett fordi bunnen er lik på begge sider av båten. På bildet under ser du at bunnlinjen får en «kul» inn mot midten på begge sider (grønn sirkel på bildet), dette er fordi det er vesentlig grunnere akkurat under brua enn på hver side av brua, siden brokarrene på hver side av båten står på en steinfylling.
 |
| SideScan av brua ved Sundvollen |
Slik ser brua ut over vann:

Ikke langt fra brua er det et velkjent gatekjøkken hvor mang en hamburger har møtt sitt endepunkt i verden. Her går det ut en rørledning i vannet, og den ser vi godt på bildene under. Her har jeg forsøkt å følge rørledningen, noe som ikke var helt enkelt siden den ikke gikk rett ut fra land. Begge bildene viser det samme røret, markert med grønt. Bunnen ellers er myk (sedimentbunn).
 |
| Rør 1 |
 |
| Rør 2 |
Slik ser det ut på land her, ikke like enkelt å koble det man ser på ekkoloddet med dette:

Det siste bildet fra Steinsfjorden er fra den lange steinfyllingen som veien er bygget på. I motsetning til steinfyllingen under brua i det første bildet vi så på, har denne steinfyllingen veldig grov stein. Dette ser vi tydelig på SideScanbildets høyre side, jeg kjører her langsmed steinfyllingen med båtens styrbord side mot fyllingen. Venstre side av SideScanbildet ser helt annerledes ut, for der steinfyllingen møter den gamle sjøbunnen er bunnen ganske myk og mye jevnere. Ofte kan det stå stor abbor akkurat i overgangen mellom steinfyllingen og den jevne bunnen. Sannsynligvis står dise mellom steinene, og bruker de som skjul for bakholdsangrep på intetanende byttefisk. Med SideScan kan jeg altså se nøyaktig hvor dette skillet går, og plassere jiggen min rett foran nesen på abboren.
 |
| Myk bunn i svart, stein i grønt |
På land ser denne steinfyllingen slik ut:

Vi beveger oss fra Steinsfjorden til Øyern. Disse bildene kan det hende at du har sett før i DENNE artikkelen. 😉 Begge bildene under viser omtrent det samme; stokker, kvist og kvast på sandbunn.
.png) |
| Tømmer, kvist og kvast på en sandbanke |
Legg merke til forskjellen mellom det tradisjonelle ekkoloddet på venstre side på bildet under. Tømmervasen blir bare en «mølje» på det vanlige ekkoloddet som ikke klarer å skjelne detaljene. Men på de skannende ekkoloddet ser vi (relativt) godt at det er kvist og kvast vi har under og rundt båten.
.png) |
| Mer tømmer |
Det nest siste skjermbildet for denne gang er fra Tyrifjorden, og her ser vi på fisk. Svake returekko på det tradisjonelle ekkoloddet på venstre side, og «skyer» på SideScan betyr agnfisk. I dette tilfellet ganske mye av de. Hadde jeg bare basert meg på det vanlige ekkoloddet, hadde jeg ikke fått med meg hvor mye byttefisk det var i dette området, men siden SideScan «ser» mer ut til sidene av båten skjønte jeg at området holdt mer byttefisk enn det tradisjonelle ekkoloddet viste der og da.Vi fikk både ørret og gjedde i dette området, så å se etter agnfisk er ofte vel så lurt som å prøve å lete opp selve rovfiskene.
 |
| Småfisk både på SideScan og 2D ekkolodd |
Begrensninger?
Som all annen elektronikk har også det skannende ekkoloddet noen begrensninger. Som jeg nevnte ovenfor, bør båten være i bevegelse for at du skal få gode bilder, ligger båten i ro blir det bare en smørje. For høy fart er heller ikke noen god ide, downscan er i praksis noe man bruker når båten ikke er i plan eller opp til 15 knop eller så, og sidescan fungerer knapt i plan i det hele tatt. På grunn av de høye frekvensene, og etterfølgende smal kone, er det skannende ekkoloddet følsomt for bølger. Beveger båten seg mye opp og ned i småkrapp sjø, blir bildene uklare og i værste fall umulige å tyde. De høye frekvensen medfører også at dette er et verktøy for ganske grunt vann, bildet av Blücher må sies å være et ekstremt eksempel på praktisk rekkevidde. Du har også lest at dette ikke primært er et verktøy for å lete etter (stor) fisk, så for en sportsfisker er det altså fortsatt det tradisjonelle ekkoloddet som er det desidert viktigste hjelpemiddelet.
Det siste skjermbildet denne gangen er fra Steinsfjorden. Poenget mitt er å vise hva som er fordelen med å kunne kjøre flere skjermer i nettverk der man har flere ting man ønsker å studere samtidig. På dette bildet har jeg DownScan, SideScan, vanlig ekkolodd og kart oppe samtidig. Selv på en Lowrance HDS 8 med sin 8,4″ skjerm begynner hvert enkelt bilde å bli lite. Det er absolutt mulig å bruke en slik firedeling av skjermen, men med flere skjermer man kan dele bildene ut over blir det mye enklere å tyde enkeltbildene/ enkeltskjermene. Alle Lowrance HDS og Simrad NSS/ NSE/ NSO kan kobles i nettverk for å dele ekkoloddbilder, og nyere enheter kan også dele kartbildet. Du trenger nødvendigvis en enhet til, og en ethernetkabel for å koble enhetene sammen. Les gjerne min artikkel om marine nettverk for å se andre eksempler på hva man kan bruke slike typer nettverk til.
 |
| Firedelt skjermbilde |